www.baader-observatories.com
www.baader-observatories.com
Update August 2025:
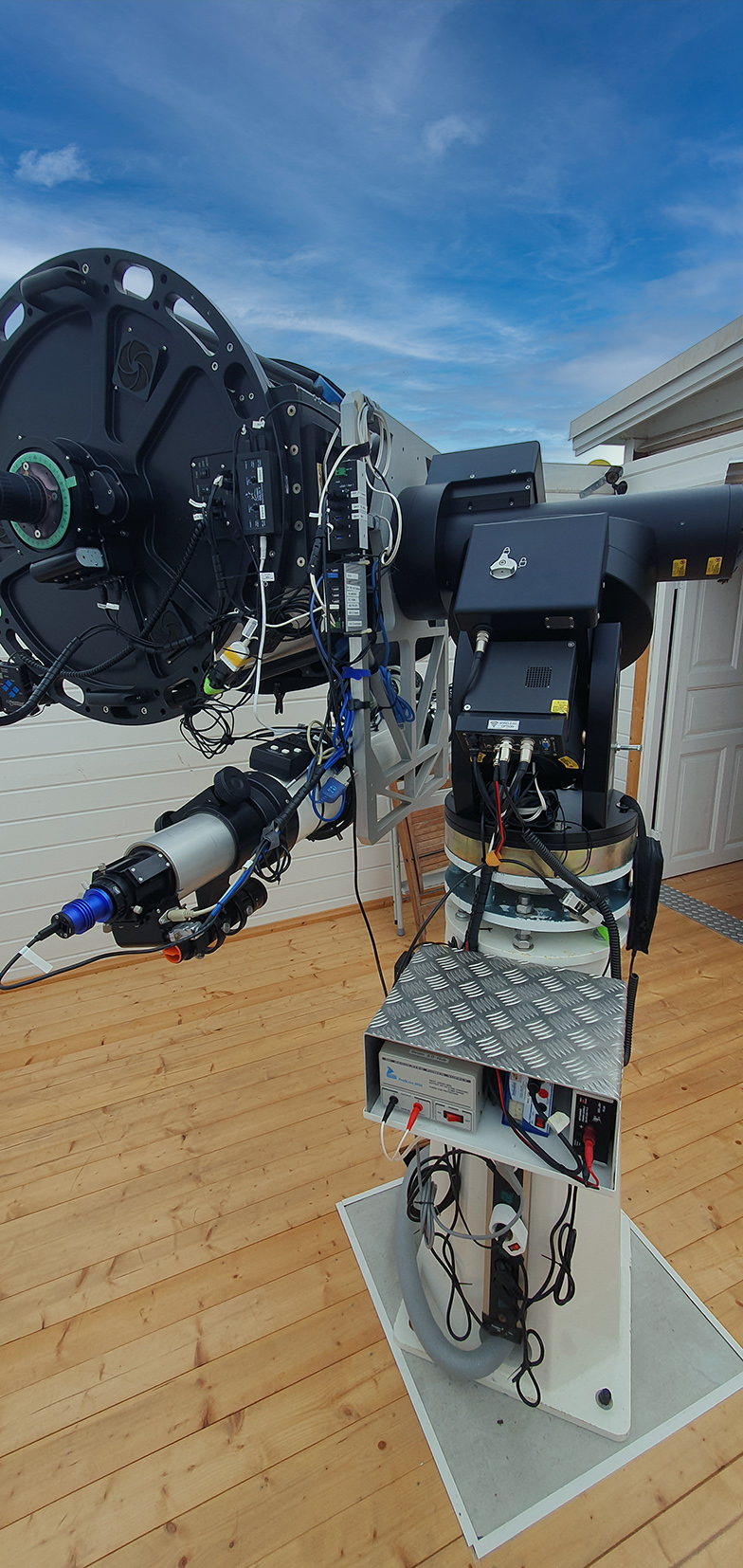
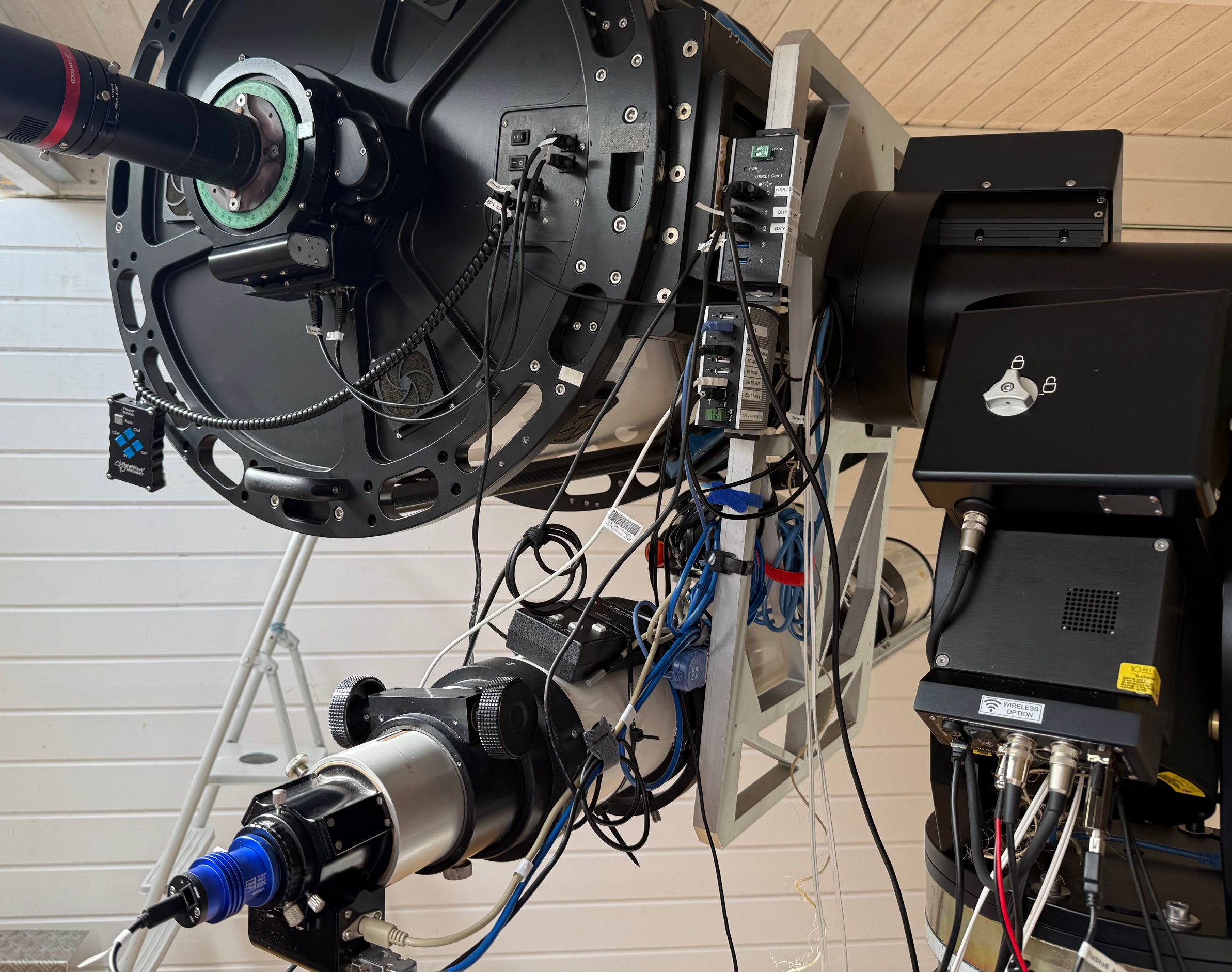
At the beginning of August 2025, we modernized the observatory of Mr. Dipl.-Ing. Günter Knerr: the previous 10Micron GM4000 QCI was replaced with a 10Micron GM4000 HPS II. The reason for the replacement is the HPS technology with absolute encoders on both axes, which enables more precise (also unguided) tracking. This saves the customer from having to operate an autoguider in parallel: fewer cables, fewer PC programs, fewer settings, fewer sources of error.
Due to the installation situation, dismantling and reassembly were carried out using a 60-ton mobile crane with a long boom. After the mechanical installation, the mount and peripherals were put into operation. The mount easily carries the heavy load of approx. 140 kg.
Already on the first night shortly after installation, the polar axis was mechanically aligned to within a few arcminutes using the firmware functions “3 Star Align” and “Polar Align.” On the second night, after a non-automated alignment with 15 stars, 5-minute unguided exposures with the PlaneWave CDK 24 were already possible. An automatic alignment with 100 positions using N.I.N.A. is planned for the next nights, which will enable unguided exposure times of more than 10 minutes.
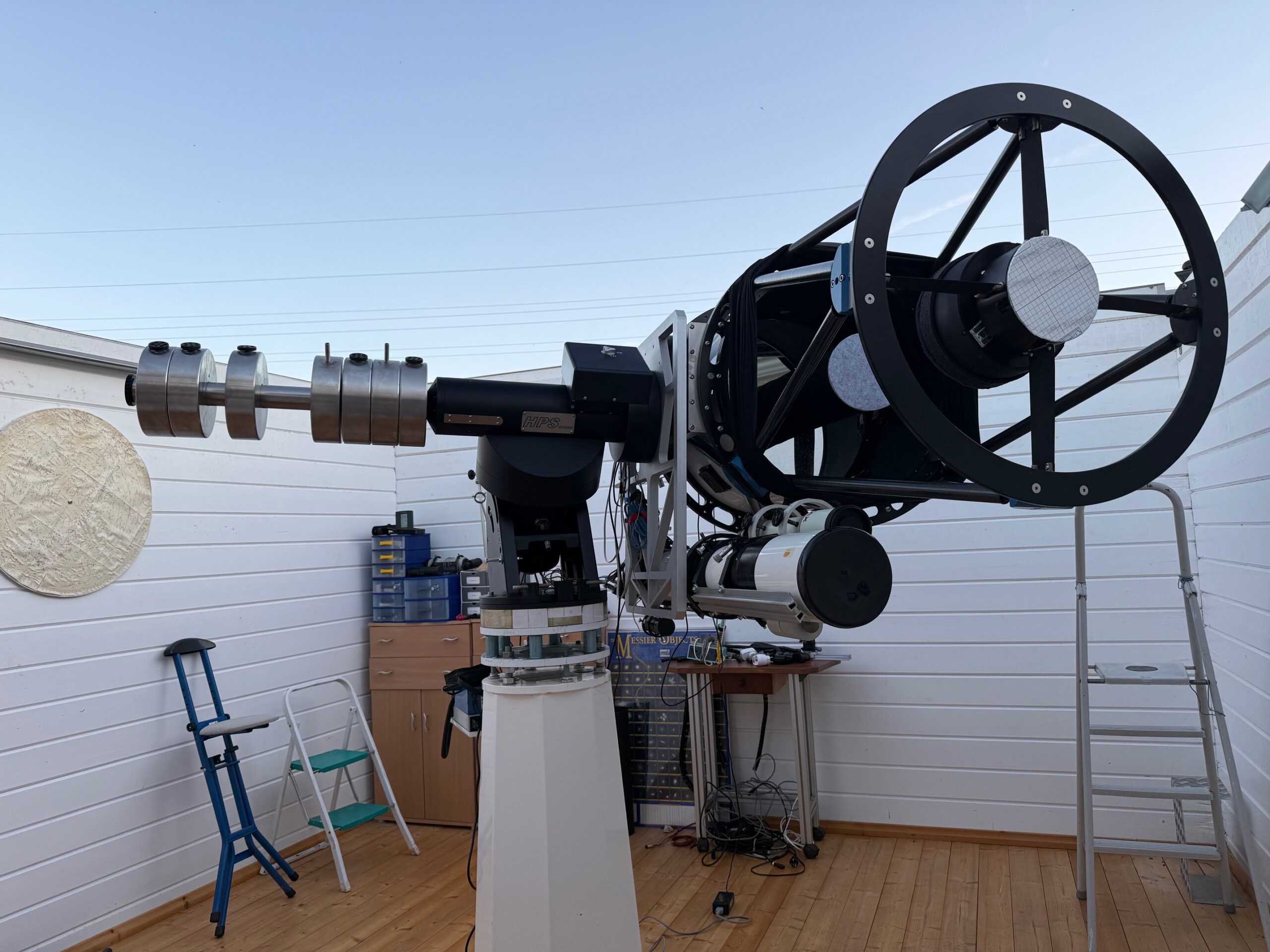
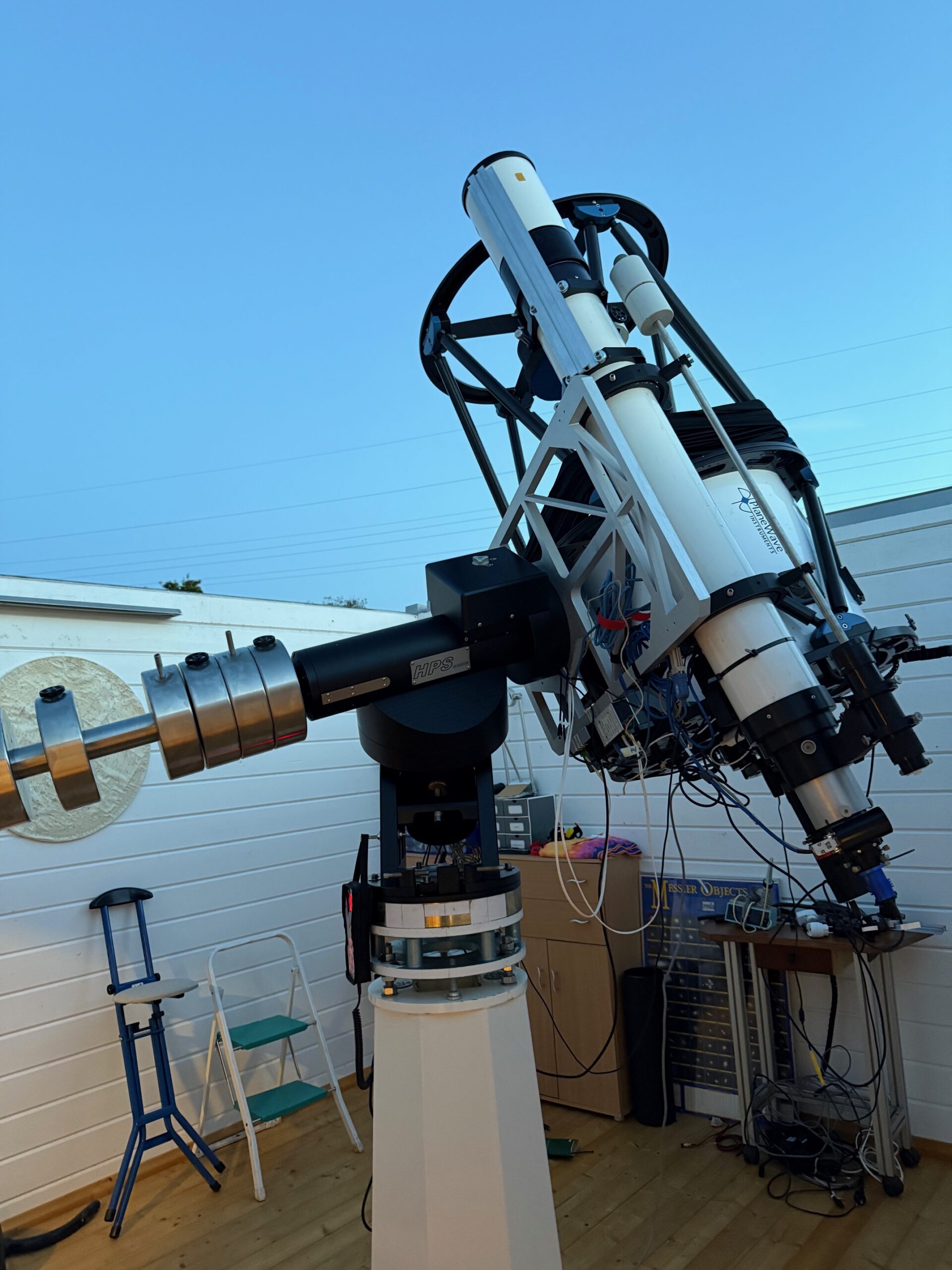
Over the years, many pieces of equipment change, including observing instruments and their mounts. 47 years ago a photo tripod was sufficient, followed by the Orion 1 from Wachter and finally a heavy self-built mount. A robust but ultimately too weak ALT-7 had to be replaced to accommodate the new instrumentation. Starting in 1973 with a 60 mm refractor from Hertel & Reuss, I have now arrived at a PlaneWave CDK24 (I own serial number 00002). The mount should easily carry the following instrument combination: a CDK24, a 6” f9 Astrophysics, and a PENTAX 75.
A rough weight calculation showed that the recommended maximum instrument weight of 150 kg was almost reached. A large mounting plate held the CDK somewhat off-center, leaving room for the refractor next to it. As a result, with all conceivable additional accessories, the weight quickly exceeded what could be balanced with the standard number of counterweights and the original shaft. 7 weights of 20 kg each were therefore required. This is where the importance of having a competent partner became apparent. For Baader, it was no problem to provide a longer declination shaft outside of standard production, allowing all weights to be mounted with some clearance. Only in the new observatory with its roll-off roof (previously a much too small 3.2 m dome) was I able to use the balancing mode of the mount. Everything was quickly balanced (<0.2% imbalance) so that both motors now perform only minimal work. Due to the very short lever arm on the instrument side, even larger variable accessories such as the CCD camera are no problem.
Then came the adjustment. Through the first models of 3–5 stars each, the mount was mechanically corrected on the very practical and well-designed column adapter via threaded spindles. Only after the N/S direction and polar height were sufficiently accurate (0.03RT = 0°00’48” in azimuth, 0.04Dn = 00°01’31” in polar height, and 0°10’03” orthogonal error) could the correction software in declination and right ascension, i.e., dual, take over the task.
Based on experience with the old observatory and identical equipment, it also became clear that even a steel column with a wall thickness of 12.5 mm was no longer sufficiently stiff and vibration-free. Even when filled with special sand, limits became apparent. Again, Baader was able to provide me with a double-walled, 1 m high, 155 kg trapezoidal column (unfilled). With the internal cable routing, tripping or tangling of cables during mount slewing at night is also avoided.
The modern 10 Micron software also communicates smoothly with the most common software applications, such as MaximDL or the older planetarium software “The Sky6.” What is important here is that the mount software is constantly being further developed. Tracking control can be carried out directly at the instrument using the hand controller, at the PC itself, or even via the Internet. What more could one want? Well, one might call it “complaining at a high level” if some aspects could be improved. For example, it would be desirable if the external program required to synchronize the clock between the mount and the Internet, and thus handle the change from CET to CEST, were part of the base software. Especially with long focal lengths of more than 4 m, accurate time is essential for the Goto function. But perhaps such a solution will be available in a future software generation 3.0?
What I would strongly recommend to every buyer, however, is the retrofit for lower sub-zero temperatures below -15°C. I personally had no problems using the mount, but the slewing speed had to be reduced by 1/3 to prevent the motor from stalling. As I said, for normal observing this is not a problem, but those interested in satellites or the ISS might encounter difficulties with automatic tracking.
The mount has now been running smoothly for 8 years, which at this level of use is a true mark of quality. Even today I would again choose the GM 4000, but probably opt for the new HPS version instead of the QCI, even though I can locate every object in the CDK with a 20 mm eyepiece in the field of view or on the 24 x 36 mm CCD chip.
Amateur astronomer Günter Knerr uses a garden shed as a professional observatory thanks to a custom-made design. Read here how this spectacular project with a roll-off roof came to life step by step: Spectacular: a garden shed as an observatory